VEMS uses the PS2 clock signal to receive 0/5V wheelspeed1 frequency signal.
Became very popular, so 2nd wheelspeed input was also implemented in software (if you need 2, request "2 wheelspeed inputs" in the order comment, see below).
- It is recommended to set calibration=0 when not used ! (for both wheelspeed1 and wheelspeed2)
- select "rising edge" ("both edge" should probably never be used)
- and calibrate afterwards (example: for old audi gearbox reed-sender: calibration=112 but it depends on pulsecount and wheel circumference and even tire pressure - use your GPS)
- See related terms and calibration values in
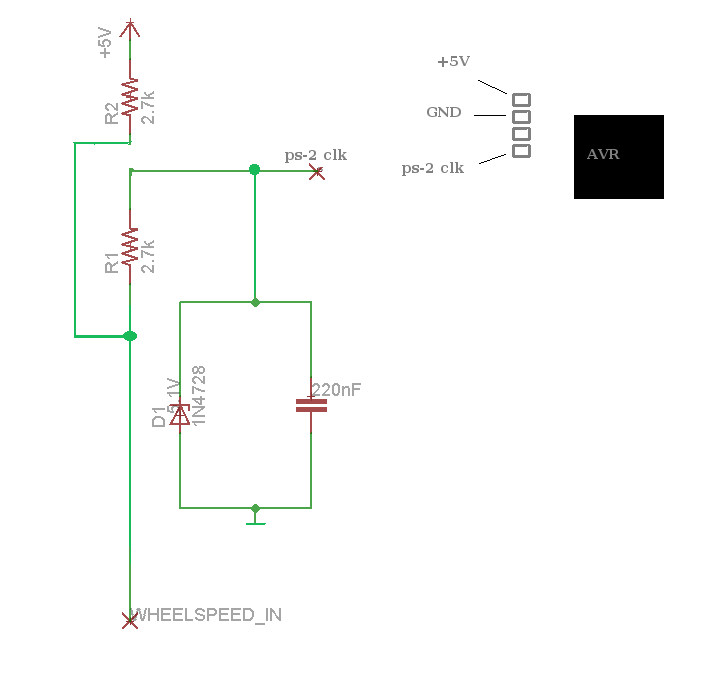
Protected connection of wheelspeed 1 - suitable for HALL sensor that pulls to GND, or 0/5V or 0/12V signal.
The circuit installed by default (WHEELSPEED_IN=EC18/8) when controller is ordered with PS2=NO (which is the recommended default):
Note:
- For wheelspeed input to work, the "non-PS2" or "wheelspeed" firmware must be uploaded
- Because the PS2 firmware uses the PS2 port for keyboard, and launch-RPM is time-based (not wheelspeed).
- VT must be always newer than firmware - preferrably use recent VemsTune
[PS2 wheelspeed cable] might come very handy for a controller ordered with PS2 (either accidentally or in the past: because PS2=NO is a better option !)
- so ordering assembled controller without PS2 is better, since than EC18/8 is wheelspeed input by default (since 2010, see attached paper or test with 0/5V frequency signal) - with internal pullup and some protection..
- DSUB9 connector is included with the PS2-wheelspeed cable, but you might need a connector for your wheelspeed signal (or tap some wire: but it's counterrecommended to tap ABS signal: WhatEverYouDoYouDoItAtYourOwnRisk). For an audi quattro 6 speed gearbox (reed-switch at the front-left wheel shaft, at least in ours) a [3 pin AMP connector] also needed (only pin2,3 used).
Warning: Sensitive pin
PS2 clock input is a direct CPU pin. It is very sensitive. Either static electricity or 12V will damage the main processor immediately.
Customers are advised to request in the WebShop order note:
- PS2 clock wheelspeed input on EC18/8
- This is standard since 2010 unless you request otherwise (in the order note).
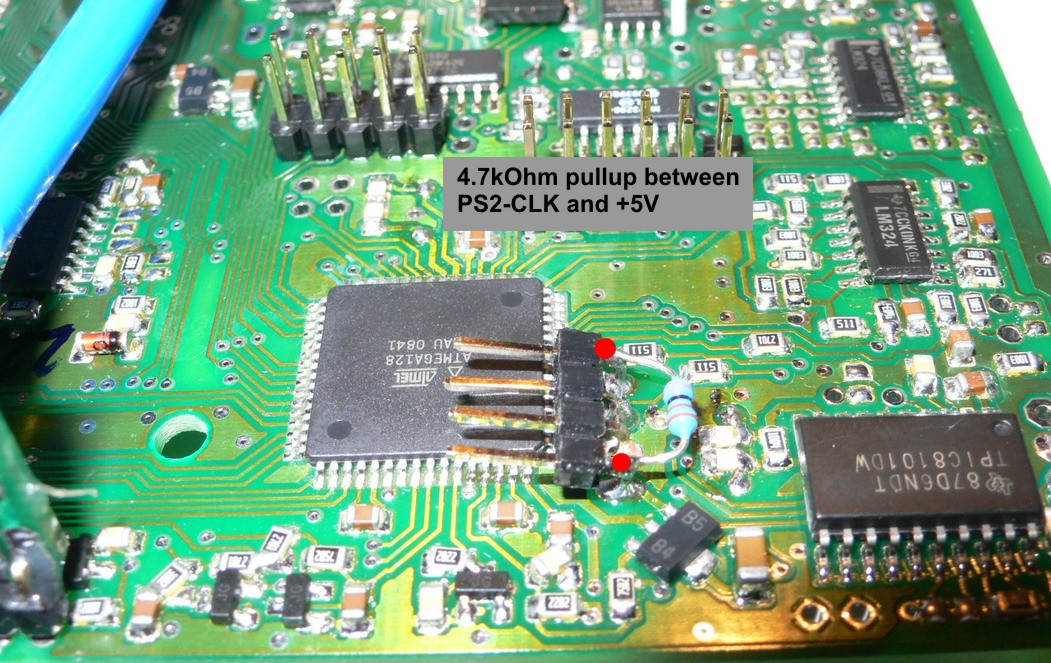
- 4k7 pullup to +5V
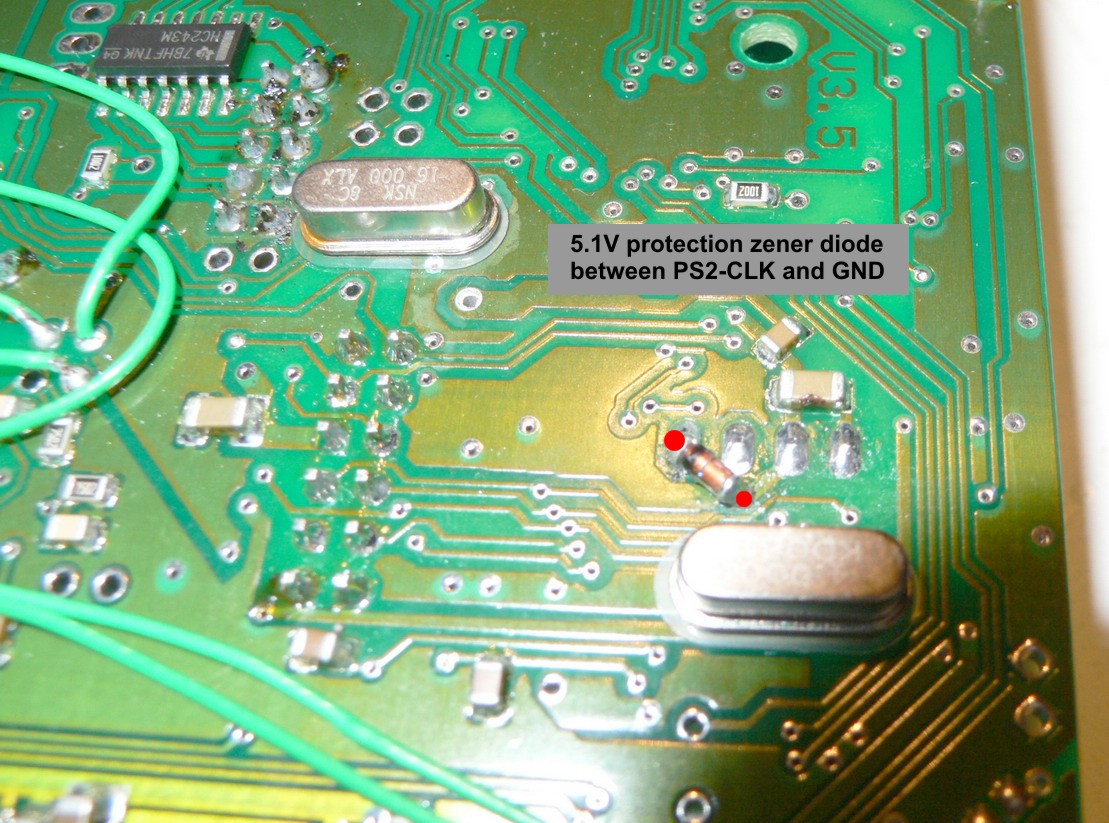
- 4k7 and 5V1 zener protection on the processor pin
- MembersPage/GergelyLezsak/AssemblyThreePointFive shows the pullup resistor and the minimum zener protection for wheelspeed1 input (this is simpler than the recommended circuit above, LACKS R1, and is NOT suitable for 0/12V input):
With the 5V1 zener it is less likely to damage it, and an open-collector HALL sensor or a VR signal and a simple NPN inverter (same as CamHALLInverter) can be used to drive the signal (LM1815 is not necessary for this, although that would work too). Care is still needed of course.
Second Wheelspeed input
Implemented in Firmware 1.1.84. Available only in non-PS2 firmwares. Connection is on the processor SCL pin, need protection and pullup resistors.
If needed, ask in order comment : protected second wheelspeed input on processor SCL pin (= Atmega128/pin25) same as wheelspeed2.
- See SCL throughole pad on image SubaruEj
- although SubaruEj 4th trigger is phisically same as wheelspeed2 (SCL pin)
- if asking for 2nd wheelspeed VR input you will get agressive filtering and VR=>HALL divider ... would not work for Subaru without HW-modification
- so in order comment ask for "Subaru 4th VR trigger input" if you need that
Configuration
- sensor calibration set the frequency which can measured at 100km/h
- egde for sensor : set where the ecu will measure ( use both if sensor signal has 50% duty cycle)
- minimum period : anti noise protection
- sensor divider : the signal can divide for high frequency sensors
Wheelspeed data usage
- logging wheelspeed to notebook, or SDcard
- sending to AfreshTiny/AimDisplay for well-visible display
- boostcontrol - gear dependent boost
- launchcontrol - wheelspeed dependent rpm-limit
Launchcontrol
The good old initial launch behaviour with retard and launch-enrichment is still there.
But after reaching the first entry in an 8 entry table (array), no retard, no enrichment:
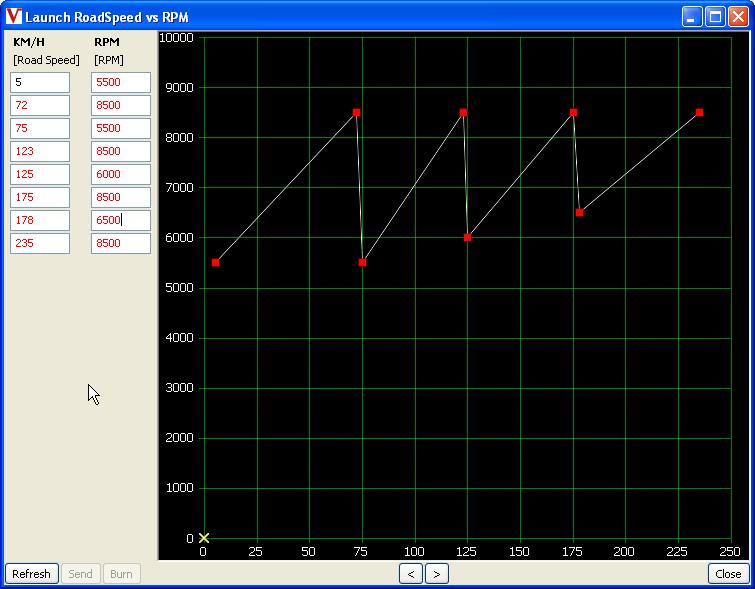
2x8 bytes for wheelspeed => RPMlimit. Firmware uses interpolation for smooth transitions between table-points.
RPMlimit is in 100 RPM unit.
wheelspeed is the unit of your choice. Usually:
- km/h
- or mph
- or any other. It really just depends on calibration
The same table is time => RPMlimit for the PS2 firmware where wheelspeed is not available. Time is in 64 msec unit.
The first and last bin in the table are somewhat special:
- Before the first entry is reached, the good old one-value RPMlimit set in config is used and retard and enrichment is applied
"Launch RPM vs Road Speed" screen:
Note: the "launch-active" flag in VemsTune only lights up when the RPM-limit is reached (not when the button is pressed - this can be confusing). So if you want to test an analog input switchbutton, configure the ALS input to that pin to see that it lights up.
Temporary note - for .ini file tweakers.
Orig [VEMS flex-fuel VT ini setup.pdf] - might be applied in newer VemsTune (possibly partially), but shows the idea/concept/verification steps.
This section should be cleaned up when these are deployed in both MegaTune and VemsTune 2009-05-xx releases.
Direct commands for page15 (launchcontrol wheelspeed=>launchRPMlimit) read/write are [] brackets.
- Offset 0..7 are RPM (unit=100 RPM)
- offset 8..15 is the wheelspeed (unit of your choice, depends on calibration)
Check the mct dump to see if s[0]= and s[1]=... values are set as you expect.
LaunchRPM vs. Wheelspeed Curve Questions from Kevin
- How exactly is it activated? Does the analog input need to be used at all?
- yes, to go to launch mode you always need to activate with an analog input.
- Or can this rpm curve be enabled permanently so it does not use up the analog input?
- currently there is a launchinput="disabled" but there is unfortunately no "always enabled" setting (same could be useful for ALS too).
- Is it possible to have the Launch RPM appear in the Data Logs?
- the RPM appears in the data-log, and sparkcut directly correlates to the difference between real-RPM and launch-RPM
- The "Disable Launch Curve" selection box looks to have bugs, it is blank, should say "Enabled". If you select "Disabled" it does not allow you to go back and enable it again.
- we'll look into this. The launch curve is (IIRC) technically disabled by 0 (speed) in the last entry. Than the (1-entry) launch_RPM setting takes effect.
REST OF THE PAGE IS BRAINSTORMING
Freq to voltage - could also be used if more than 2 wheelspeed inputs required
[LM2917] (see appnote) frequency to voltage converter to get wheelspeed info (on display, logging, anytrim, ...).
brieken: Would it be possible to use gps speed as wheelspeed input. This would create a "non driven" wheel on a 4WD car. So we can measure wheelspin.
- unfortunately the GPS signal (at least for non-military GPS) is filtered and slow (when needed the most: when speed changes) so it's practically useless for wheelspin measurement. 2nd wheelspeed must be connected for that