A villanyautókban lehet egyenáramú és váltóáramú motorokat is használni, mivel a jelenlegi elektronikus vezérlők segítségével már szinte azonos szintre lehet hozni a különböző villanymotor típusok hatásfokait. Ugyanakkor a váltóáramú motorok vezérlése jóval összetettebb, mint az egyenáramúaké, ezért a továbbiakban csak az egyenáramú motorokról lesz szó. Ha azonban érdekelnek a váltóáramú motorok is, akkor ezekről itt olvashatsz. (A generátorok motorokként is üzemelhetnek és viszont.)
![]()
A motorok a legkülönbözőbb méretekben kaphatók, de mind egy célt szolgálnak: az elektromos energiát mechanikai energiává alakítják. A DC motorok olyan motorok, melyek táplálásához egyenáramra van szükség.
Az elektromos motorok a legkényelmesebb forrásai a mozgatóerőnek. Csöndesek és tiszták, azonnal beindulnak és lehetnek olyan kicsik, hogy egy órát működtessenek, vagy olyan nagyok, hogy a világ leggyorsabb villanyvasútjait is hajthatják.
Az egyenáramú motor felépítése és működési elve
Különböző fajta egyenáramú villanymotorok léteznek, de a működési elvük ugyanaz. Ennek megértését segíti a következő ábra.

1. ábra. Az egyenáramú motor működési elve
Az egyenáramú motor állandó mágnesekből áll, melyek között egy vezeték (tekercs) található. Ahhoz, hogy a vezeték alkotta hurok elforduljon, a két végét egyenáramú áramforrásra kell kapcsolni, de úgy, hogy közben a vezeték elfordulhasson a saját tengelye körül. Ahhoz, hogy ez megoldható legyen, a vezető hurkot un. kommutátorra csatlakoztatjuk, melyhez érintkező kefék kapcsolódnak. A kefék biztosítják az elektromos csatlakozást a kommutátorral, miközben az forog, így folyamatos a kapcsolat a vezető hurok és az áramforrás között. A hurokban folyó elektromos áram mágneses mezőt hoz létre, mely kapcsolatba lépve az állandó mágnes mezejével a hurkot elforgatja.
Egy szemléletes, Java-ban írt demonstrációt láthatsz itt.
Az egyenáramú villanymotorok tulajdonságait leíró paraméterek a nyomaték, a teljesítmény és a sebesség. Ezeket vizsgáljuk meg egy kicsit közelebbről a következő sorokban.
A nyomaték
A nyomaték fogalmát olyan erők esetében használjuk, mikor azok forgató hatást fejtenek ki. Nyomatékot fejtünk ki pl. a régebbi telefonok tárcsázásakor, lyukak fúrásakor vagy pl. egy csavar becsavarásakor.
2. ábra. A nyomaték
Mint a 2. ábrán látjuk, a nyomaték a szerszám végére kifejtett függőleges irányú erő hatására jön létre. Ez az F erő a szerszámot az O pont körül fordítja el. A lefelé irányuló erőt felbonthatjuk sugárirányú (Frad) erőre, mely párhuzamos a szerszám erőkarjával, és érintő irányú erőre (Ftan), mely merőleges a szerszám erőkarjára. A sugárirányú erő nem vesz részt a nyomatékban, ellentétben az érintő irányú erővel. Az O pont és az F hatóerő közötti távolságot irányvektornak (r) nevezzük. Az erőkar nyomatéka (l) az O pont és az F erő közötti "derékszögű" távolság.
Ha lecsökkentjük az erőkar nyomatékát azáltal, hogy az erőt az O ponthoz közelebb fejtjük ki, akkor a szükséges nyomaték növekszik.
3. ábra. A kerékre kifejtett nyomaték
A nyomaték meghatározásának képlete:
N = F * r * sin(f)
A sebesség
Az egyenáramú motorok olyan eszközök, melyek az elektromos energiát forgató mozgássá alakítják át. Mikor adott feszültséget kapcsolunk a motorra, akkor az adott sebességgel forog. A forgási sebességnek vagy más néven szögsebességnek (w) a mértékegysége fordulat/másodperc vagy fordulat/perc.
A szögsebességből (w) meghatározhatjuk az érintő irányú sebességet a forgó test bármelyik pontján a következő képlettel:
v = r * w
ahol:
- v - az adott ponton mért érintő irányú sebesség
- r - a forgás középpontjától mért távolság
- w - a szögsebesség
4. ábra. A szögsebesség
Ez az egyenlet csak állandó sebesség esetén használható.
A teljesítmény
A forgó mozgás teljesítményét a következő képlettel határozhatjuk meg:
P = N * w
ahol:
- P - a forgómozgás teljesítménye
- N - a nyomaték
- w
- a szögsebesség
Az egyenáramú motor karakterisztikái
Az egyenáramú motorok tervezésekor tisztában kell lennünk a motor karakterisztikáival. Minden motor rendelkezik egy Nyomaték/Sebesség görbével és egy Teljesítmény görbével.
Nyomaték/Sebesség görbe
A következő ábra az egyenáramú motor Nyomaték/Sebesség görbéjét ábrázolja.
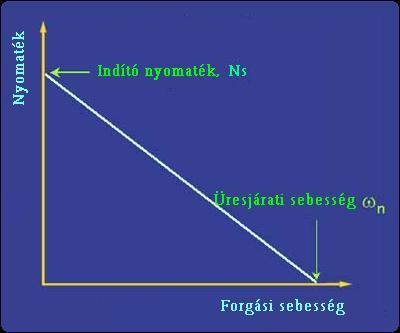
5. ábra. Az egyenáramú motor Nyomaték/Sebesség görbéje
Vegyük észre, hogy a nyomaték fordítottan arányos a motor tengelyének sebességével. Más szavakkal egyfajta egyezségre kell jutnunk, hogy mekkora nyomatékot szeretnénk levenni a motorról és hogy mekkora sebességgel kell forognia a motornak. Az egyenáramú motorok két legjellemzőbb tulajdonsága az 5. ábrán látható görbe két szélsőértéke:
- Az indító nyomaték (Ns) az a nyomatékérték, ahol a nyomaték maximális, de a tengely még nem forog
- Az üresjárati sebesség (wn) a motor maximális sebessége, ahol a motor már nem fejt ki nyomatékot
A görbe ennek a két szélsőértéknek az összekötésével rajzolható fel, melyek egyenlete felírható a nyomaték és a szögsebesség nézőpontjából:
N = Ns-w*Ns/wn
w =(Ns-N)*wn/Ns
Feljebb meghatároztuk, hogy a teljesítmény a nyomaték és a szögsebesség szorzata, ami megfelel a Nyomaték/sebesség görbe alatti négyzetnek. Ezt mutatja a következő három ábra.
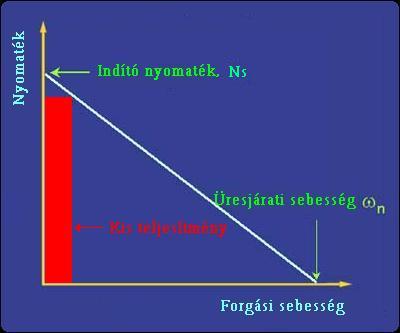
6. ábra. Kis teljesítmény
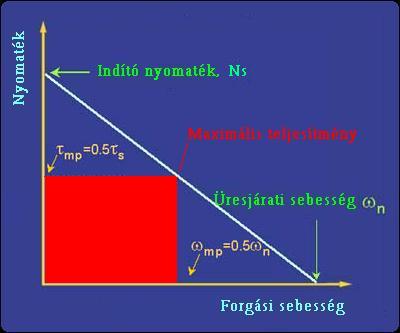
7. ábra. Maximális teljesítmény
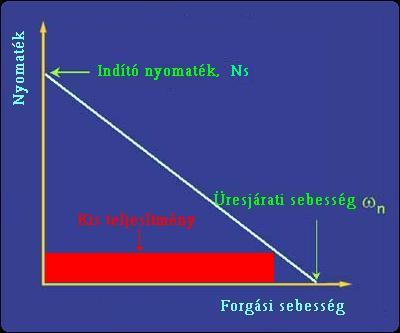
8. ábra. Kis teljesítmény
A nyomaték és a sebesség közötti fordított arányosság miatt a maximális teljesítményt akkor kapjuk meg, mikor w = 1/2 * wn és N = 1/2 * Ns.
Teljesítmény/Nyomaték és Teljesítmény/Sebesség görbék
A nyomaték és szögsebesség számításait a teljesítmény meghatározásának képletébe behelyettesítve láthatjuk, hogy az egyenáramú motor teljesítménye egy másodfokú egyenletet ad.
P(w)= -(Ns/wn)*w2+Ts*w
P(N)= -(wn*Ns)*N2+wn*N
Ezek a kifejezések megint csak azt mutatják, hogy a maximális kimeneti teljesítményt akkor kapjuk meg, mikor w = 1/2 * wn és N = 1/2 * Ns.

9. ábra. Teljesítmény/Sebesség és Nyomaték/Sebesség görbék
Az anyagot angol nyelven itt találod.
Külső gerjesztésű villanymotorok
A nagyobb teljesítményű egyenáramú motorok már nem állandó mágneseket használnak, mivel a nagy teljesítményfelvételek mellett az állandó mágnesek lemágneseződnének. Ezért célszerű az állórész mágneses mezejét is inkább tekercsekkel létrehozni.
Háromféle kapcsolás létezik:
- Mellékáramkörű (párhuzamos) kapcsolás - Ez a motor egyenletes
sebességgel forog, függetlenül a terheléstől. Olyan ipari alkalmazásokban
használjuk ezt a kapcsolást, ahol az indításkor nem szükséges nagy nyomaték.
10. ábra. Mellékáramkörű kapcsolás
11. ábra. A mellékáramkörű kapcsolás Nyomaték/Sebesség görbéje
- Főáramkörű (soros) kapcsolás - Ennek a motortípusnak a fordulatszáma
a terhelés növekedésével automatikusan csökken. A soros motorokat azokban
az esetekben használjuk, mikor az indításkor nagyon nagy nyomatékot kell
kifejteni, azaz mikor valamilyen nehéz testet kell mozgásba lendíteni (pl.
liftnél vagy villanyautónál stb.) A soros motorokat sohasem szabad terhelés
nélkül beindítani, mivel ekkor a motor sebessége olyan mértékre gyorsulhat,
hogy az tönkreteheti a motort.
12. ábra. Főáramkörű kapcsolás
13. ábra. A főáramkörű kapcsolás Nyomaték/Sebesség görbéje
- Vegyes áramkörű kapcsolás - Ez a mellék- és főáramkörű kapcsolás kombinációja. A kapcsolás karakterisztikája a kombináció módjának függvényében változhat. Az ilyen motorokat rendszerint ott használják, ahol az indításkor nagy nyomatékot kell kifejteni, de az állandó sebesség is fontos.
Az információt angol nyelven itt olvashatod.
A villanymotor kiválasztása
A villanyautóban a legcélszerűbb a soros kapcsolású egyenáramú motorok használata. Egy tipikus, villanyautókban használt villanymotor képét a következő ábrán láthatod.

14. ábra. Az FB1-4001A típusú motor metszete
Az egyenáramú motorok teljesítménye egyenes arányban van a rákapcsolt feszültséggel és a tekercsekben folyó árammal. Ezt a következő képlettel tudjuk meghatározni:
PLE = U * I * h / 746
A következő táblázatban néhány villanyautóban használt villanymotor teljesítményét láthatjuk lóerőben kifejezve.
|
Típus
|
Feszültség
|
||||||||
|
24 V
|
36 V
|
48 V
|
60 V
|
72 V
|
96 V
|
108 V
|
120 V
|
144 V
|
|
| A00-4009 |
2 LE
|
4 LE
|
6 LE
|
10 LE
|
|||||
| K91-4003 |
5 LE
|
6 LE
|
8 LE
|
10 LE
|
|||||
| L91-4003 |
12 LE
|
14 LE
|
|||||||
| X91-4001 |
10 LE
|
12 LE
|
14 LE
|
16 LE
|
20 LE
|
||||
| 203-06-4001A |
16 LE
|
19 LE
|
22 LE
|
26 LE
|
|||||
| FB1-4001A |
18 LE
|
21 LE
|
23 LE
|
26 LE
|
30 LE
|
||||
1. táblázat. A különböző típusú DC motorok teljesítménye a feszültség függvényében
A belsőégésű motorok esetében a maximális teljesítményt szokták megadni LE-ben, a villanymotoroknál pedig a folyamatosan leadni képes teljesítményt. Ebből kiindulva nagyon jó közelítéssel meghatározhatjuk a szükséges villanymotor típusát, egyszerűen csak osszuk el 1,6-del a robbanómotor teljesítményét. Tehát:
Pvill = Prob / 1,6
Ha például az átalakítandó autó robbanómotorjának a (csúcs)teljesítménye 45 LE, akkor az átalakításhoz szükséges villanymotor teljesítménye:
Pvill = 45 LE / 1,6 = 28,1 LE
Ezek szerint erre a célra megfelel a 203-06-4001A, de még jobb az FB1-4001A típusú motor. (lásd az 1. táblázatot)
Az áramerősséget növelve nem túl hosszú ideig, azaz kb. 3-5 percig a villanymotorok a névleges teljesítményüknek le tudják adni akár a másfélszeresét, nagyon rövid ideig pedig akár több mint a háromszorosát is. Ezek szerint az FB1-4001A típusú motor pár percig 45 LE-t is tud produkálni, pl. emelkedők esetén vagy gyorsításkor, de kb. 20-30 másodpercig akár 100 LE-t is le tud adni.
Mivel ekkor megnöveltük a motoron keresztülfolyó áram erősségét, azon kívül, hogy ezzel csökkentettük az egy töltéssel megtehető km-ek számát, még a motor is nagyon melegszik. Ha hosszú ideig terheljük túl a motort, akkor az tönkre is mehet (megfelelő hűtés hiányában).
A következő táblázatban a motorok fordulatszámait tekinthetjük meg.
|
Típus
|
Fordulatszám
|
| A00-4009 |
1500 - 4000 / perc
|
| K91-4003 |
1500 - 4000 / perc
|
| L91-4003 |
1500 - 4000 / perc
|
| X91-4001 |
700 - 5000 / perc
|
| 203-06-4001A |
1700 - 4800 / perc
|
| FB1-4001A |
1000 - 5000 / perc
|
2. táblázat. A motorok fordulatszáma
Mint látjuk, ezek a fordulatszámok közel megegyeznek a belsőégésű motorok fordulatszámaival, tehát meghagyva a sebességváltót az autónk sebessége is a megszokott marad, bár a gyorsulási képessége jobb lesz.
Az itt látható adatokat egy amerikai cég honlapjáról vettem (lásd itt), akik kizárólag villanyautók és villanyhajók átalakításához árulnak alkatrészeket és segítenek a számítások, tervezések elvégzésében is.
Az itt következő táblázatba írd be, hogy hány LE-s belsőégésű motor van az átalakítandó autódba s megkapod a javasolt villanymotor teljesítményét.
|
Jelenlegi motor teljesítménye
|
Javasolt villanymotor teljesítménye
|
|
LE
|
LE = kW
|
3. táblázat. Az ajánlott villanymotor teljesítménye
A következő táblázatban add meg a kiválasztott villanymotor jellemzőit. Ezekre az adatokra a következő oldalaknál lesz szükségünk. A villanymotorok száma lehet egynél több is, ekkor úgy számoljuk, hogy azok párhuzamosan vannak kötve, vagyis a feszültség állandó marad, de a teljesítmény annyiszorosára növekszik, ahány motort szeretnél használni. Több motor esetén az egy motorra jellemző teljesítményt kell beírni a második sorba.
|
||||||||||
4. táblázat. A kiválasztott villanymotor(ok) jellemzői
A következő oldalon a DC villanymotorok vezérlésével ismerkedhetsz meg.
![]() Átalakítási
tanácsok
Átalakítási
tanácsok![]() Menü
Menü![]() DC
motorok szabályozása
DC
motorok szabályozása![]()
Utolsó frissítés dátuma: 2006 április 06.