A dinamóról
Ez a dinamó egy közös tengelyre szerelt 5 pólusú impulzus motorból és egy állandó mágneses generátorból áll. A 19 mm átmérőjű tengely cinklemezzel van bevonva, az egész szerkezet pedig fenol kalitkába van zárva.

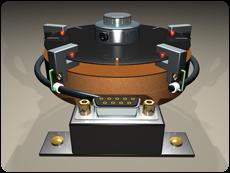
1. ábra. A NEOGEN dinamó a meghajtókkal
A NEOGEN dinamó felépítése
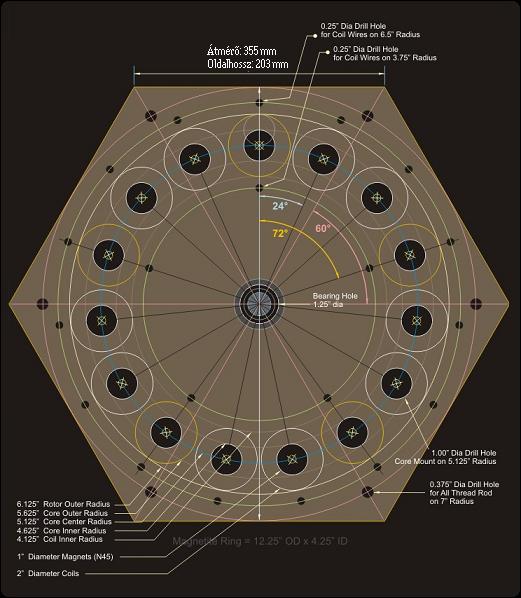
A dinamó két közös tengelyre szerelt hatszög alakú állórészből és egy rotorból áll. Ugyanezen a tengelyen található egy lendkerék és egy foto-kommutátor.
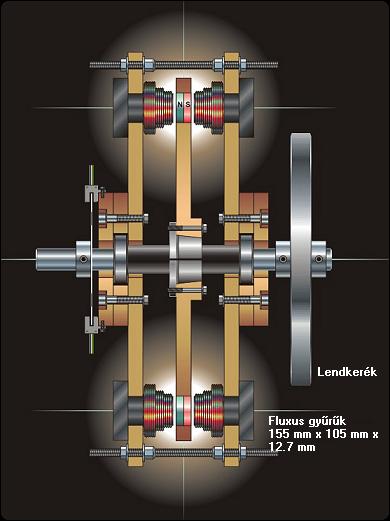
2. ábra. A NEOGEN dinamó függőleges oldalnézete
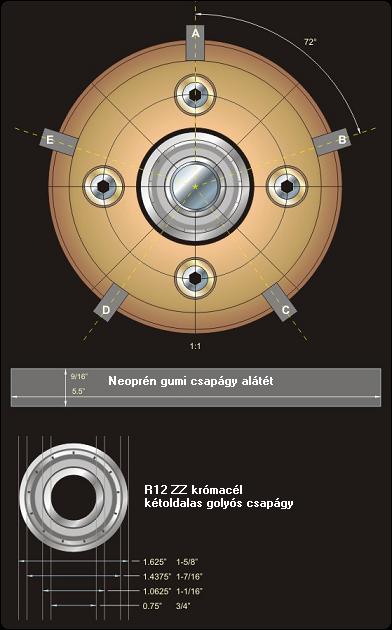
3. ábra. A rotor lemez a mágnesekkel

4. ábra. A vezérlő tengely
A mágnesek
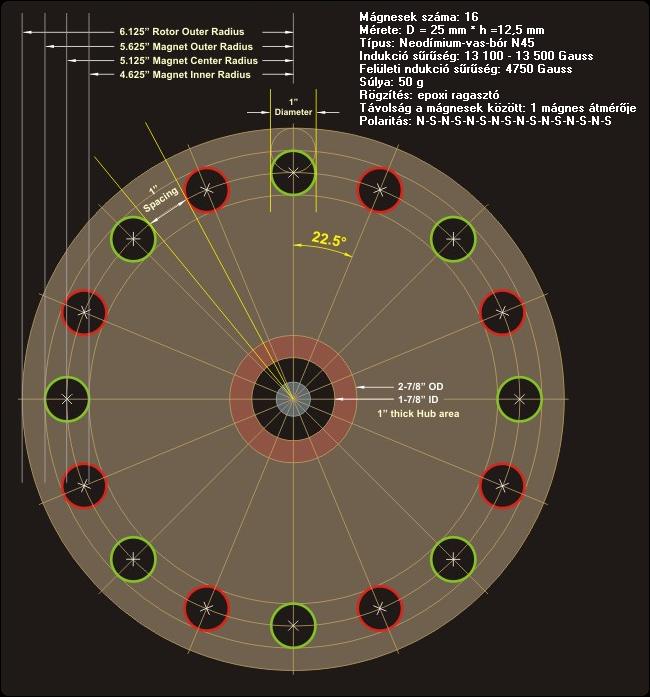
A mágnesek 25 mm * 25 mm N45 nikkellel bevont kör alakú Neodímium-vas-bór típusú ritka földfém mágnesek.
A mágnesek egy 25 mm vastag fenol rotor lemezbe, a lemez kerülete mentén egymástól 25 mm-re vannak elhelyezve. A szomszédos mágnesek polaritása váltakozó: É-D-É-D-É-D-É-D-É-D-É-D-É-D-É-D
5. ábra. A mágnesek elhelyezkedése
A mágnesek visszahúzó hatásának passzív csökkentése
A mágnesek mechanikai visszahúzó hatása problémákat okoz, különösen akkor, ha Neódium mágneseket használunk. A 16 mágnes/15 tekercs páros/páratlan elrendezése minimalizálja a mágnesek visszahúzó hatását azáltal, hogy a vonzást a geometriai elrendezésből adódóan progresszív módon kiegyenlítjük. Ez egy teljesen passzív megoldás.
6. ábra. A visszahúzó hatás passzív csökkentése
A tekercsek
A tekercsek 25 mm átmérőjű amorf magnetit magra vannak tekercselve, ezáltal a hiszterézis és az örvényáram okozta melegedés veszteségeit a minimumra lehet csökkenteni. Ez feljavítja a teljesítmény tényezőt is, mivel a feszültség és az áram közötti fáziseltérés minimális lesz.
A magnetit keverék 70 % finom szemcséjű por magnetitből és 30 % üveggyapot gyantából áll. Ez szilárd, rúd alakú vasmagot képez a tekercsek számára.
Mindegyik tekercs 1,63 mm átmérőjű mágneses vezetékből áll, a menetszám 52. A tekercsek kúpos kialakításúak, melyek a rotortól kifelé haladva tágulnak, ezáltal minimalizálják a rotor fordulatszámának növekedésével megjelenő nagyobb áramok keltette mágneses vonzerőt.

7. ábra. A tekercsek és vasmagok felépítése (30 egység szükséges: 10 meghajtó tekercs és 20 generátor tekercs)
Pár szó a kúpos kialakítású tekercsekről:
Ez egy unikális nulla ellenállású kialakítás, ahol a terhelés által igényelt áramnövekedés nem okoz a tekercs vasmagjában mágneses ellenállást. A hagyományos elektromágneses tekercseknél fentről lefelé haladnak a menetek, így mikor a mágnes a tekercs mentén elhalad, akkor annak mozgását egy ellentétes irányú mágneses mező fékezi.
Ebben az új kialakításban a tekercs a vasmag harmadánál vagy felénél kezdődik és a vasmag teljes további részét befedi, miközben a menetszám a vasmag vége felé közeledve növekszik. Ez a kialakítás nagyon hasonlít a homopoláris motorok kialakítására, ahol nincs ellenállás, függetlenül attól, hogy mekkora áramot vesz is fel a terhelés.
A tekercsek párba vannak rendezve úgy, hogy a rotor lemez mindkét oldalán található egy-egy tekercs, melyek megfelelő polaritással sorba vannak kötve.
Nikola Tesla az 512,340 lajstromszámú szabadalmában elmagyarázza, hogy ha egy hagyományos 1000 menetes tekercsre 100 V-ot kapcsolunk, akkor a menetek közötti feszültségkülönbség 0,1 V, egy hasonló bifiláris tekercs esetén a menetek közötti különbség viszont már 50 V. A bifiláris tekercsnél az eltárolt energia 502 / 0,12 = 250 000-szer haladja meg a hagyományos tekercsben tárolt energiát.
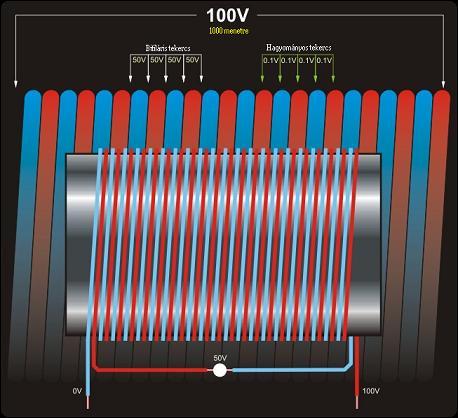
8. ábra. A Tesla féle bifiláris tekercs
A menetek közötti nagyobb feszültség a közöttük kialakuló parazita C kapacitáson több töltést halmoz fel, ezt jelzi a magasabb eltárolt energiaszint.
Ez a C összetevő egyúttal lenullázza a tekercs önindukciós hatását - azaz a tekercs természetes ellenállását az áram változásával szemben - így csak a rézvezeték ohmikus ellenállásával kell számolni.
A bifiláris tekercs előnyei:
- A tekercs gyorsabban reagál az impulzusokra
- A mágneses mező erősebb
- A mező leépülésekor megnövekszik az ellenkező irányú elektromotoros erő
- A generátor kimeneti teljesítménye növekszik
A foto-kommutátor
Egy átlátszó, 5 pólusú foto-kommutátor lemez van a tengelyhez erősítve a záró csavar acélgallérjának egyik oldalán. Ez a rotorral együtt forog.
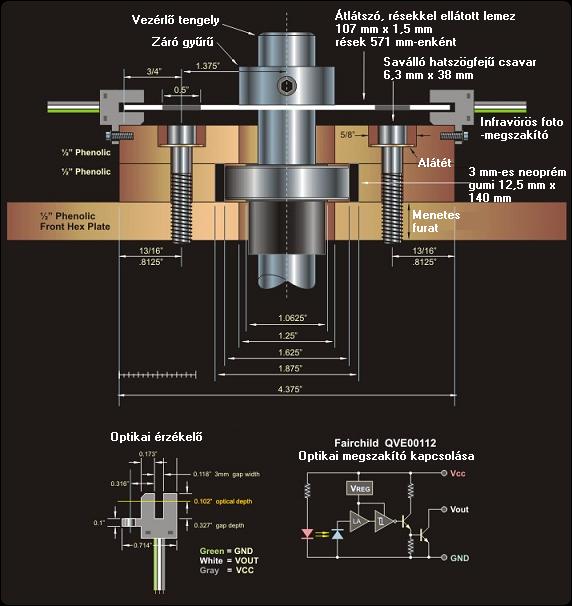
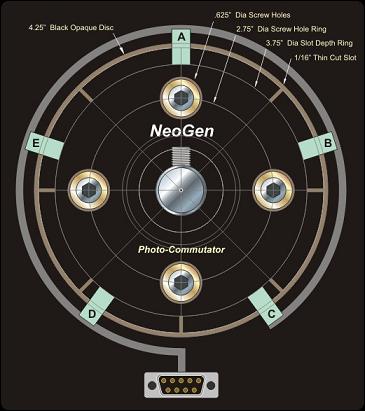
9. ábra. A foto-kommutátor
Az infravörös sugarat a réssel ellátott foto-megszakító 5 helyen szakítja meg. A rések a lemez szélein vannak kialakítva.
10. ábra. A foto-kommutátor felülnézetben
A foto-megszakítók egyhelyben állnak és az 5 meghajtó tekercsnek megfelelő szögben helyezkednek el.
11. ábra. A foto-kommutátor bekötése
A sugárirányú rések a kommutátor lemez kerületén vannak kivágva, miközben megjelölik a rotor 8 célmágnesének a szöghelyzetét. Annak ellenére, hogy egyszerre csak egy foto-megszakító lép működésbe, az 5 lehetséges vezérlő impulzus sorrend különbözik egymástól.
|
|
|
12. ábra. A foto-kommutátor megszakítói
A foto-megszakító egy monostabil multivibrátort vezérel, ezzel lehetővé válik a kapcsoló impulzusok késleltetésének és hosszának a szabályozása.
MOSFET kapcsoló
Mindegyik foto-megszakító egy-egy nagysebességű teljesítmény MOSFET-et vezérel, melyek rövid idejű, meredek felfutó élű, nagyáramú impulzusokat juttatnak a hozzájuk rendelt vezérlő tekercsekre.
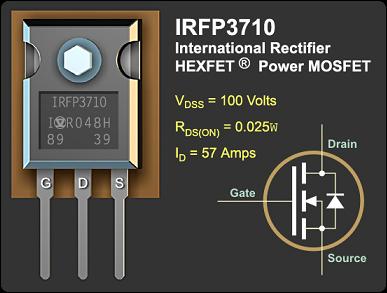
13. ábra. Az IRFP3710 teljesítmény MOSFET
Mindegyik teljesítmény MOSFET-et egy-egy MAX628 típusú nagysebességű MOSFET meghajtó IC vezérel. Ez az illesztő eszköz (IC) fogadja a foto-kapcsoló impulzusait és meredekebb felfutásúvá teszi egy közbülső Schmidt Trigger segítségével, mielőtt az impulzus a komplemens meghajtókra kerülne.
A kiválasztott Teljesítmény MOSFET az IRFP3710, melynek határérékei 100 V és 57 A, a bekapcsolási ellenállása pedig 0,025 W.
Vezérlő impulzus
A vezérlő impulzus egy erős elektromágneses teret indukál a vezérlő tekercs körül, amely úgy van polarizálva, hogy taszítsa a rotor azon mágnesét, mely a vezérlő tekercspár között van éppen.

14. ábra. Páros-páratlan mágneses visszahúzó hatás csökkentése
A rotor mágneseinek csak az egyik polaritását taszítjuk:
- az elülső panelnél az északi pólust taszítjuk
- a hátsó panelnél a déli pólust
Azáltal, hogy a rotor mágnesének csak az egyik polaritását taszítjuk, kiküszöböltük a vezérlő tekercsekre kapcsolt impulzusok polaritásának változtatgatását, ami által viszont jelentősen leegyszerűsítettük a vezérlő elektronikát.
Mindezek miatt ezt a vezérlést unipoláris vezérlő rendszernek hívjuk.
A vezérlő impulzus a rotor mágnesének mindkét felét egyidejűleg taszítja. A vezérlő tekercsek az állórészhez vannak erősítve, ezért ez a taszító erő nagy erővel forgatja el a rotort a tengely mentén.
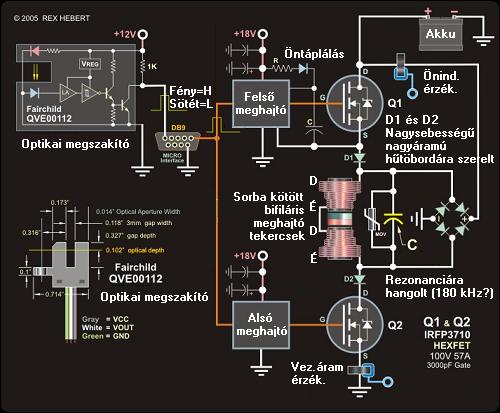
15. ábra. A vezérlő elektronika kapcsolási rajza
A Q1 és Q2 egyidejűleg adja az impulzust.
Amikor a Q1 és Q2 BE van kapcsolva, akkor a vezérlő tekercsek a táp pozitív sarkára és a testre kapcsolódnak, s az így keletkezett mágneses mező taszítja/vonzza a rotor mágneseit.
Amikor a Q1 és Q2 KI van kapcsolva, akkor a vezérlő tekercsek le vannak kapcsolva a táp pozitív sarkáról és mind az önindukciós áram, mind pedig a rotor mágnesei által indukált áram egyenirányítás után visszajut az akkumulátor bemenetére.
A legtöbb komplemens meghajtó IC rendelkezik olyan védelemmel, ami megakadályozza, hogy a két komplemens meghajtó egyidejűleg be legyen kapcsolva. A teljesítmény MOSFET-eket gyorsan kell vezérelni. A ki/be kapcsolásra fordított idő növeli a MOSFET hőmérsékletét.
A vezérlő impulzusok időzítése nagyon fontos dinamikus tényező, ezért ezt valós időben a legjobban egy mikrokontrollerrel vezérelhetjük.
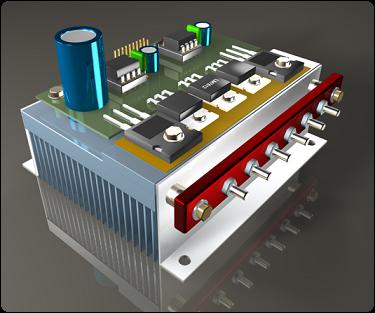
16. ábra. A vezérlő áramkör
A mikrokontroller
A valós idejű optimalizálás nagyon fontos tényező.
A motor természetesen a mikrokontrolleres vezérlés nélkül is működik, viszont ha mikrokontrollert illesztünk a foto-kommutátor és a MOSFET kapcsolók közé, akkor az impulzusok idejét és szélességét valós időben állandóan szabályozni tudjuk.
Miután a motort összeszereltük és azok részeit fizikailag optimalizáltuk, akkor a geometriai kialakításon már nem tudunk változtatni. Az egyetlen tényező, amit módosíthatunk a fordulatszám, ezáltal pedig a kimeneti teljesítmény.
Az impulzus idejének hosszát és a késleltetését változtatva a fordulatszámot dinamikusan módosíthatjuk, ezáltal a fizikai konstrukció esetleges kisebb hibáit korrigálhatjuk.
A vezérlő impulzusok dinamikus szabályozása minimalizálja a vezérlő rendszer teljesítmény felvételét és lehetővé teszi az időben történő csúsztatást, ami csökkenti a kimeneti rész fogyasztását.
A foto-kommutátor impulzusai a mikrokontroller bemenetére jutnak, mely aztán módosítja a késleltetést és az impulzus idejét, még az előtt, hogy a foto-kommutátor jelei a MOSFET kapcsolókra kerülnének.
A mikrokontroller lehetővé teszi a a fordulatszám optimalizálását és szabályozását, valamint lehetővé teszi mind a mágnesek, mind pedig a tekercsek sugárirányú és kerületi pontatlanságainak korrigálását.
Választásom a NetMedia Inc. által gyártott BasicX-24 mikrokontrollerre esett annak nagy sebessége és nagy tárkapacitása, valamint a lebegőpontos számítások, megszakítások, időzítők és a 10 bites A/D átalakítók jelenléte miatt. Ezek a tulajdonságok leegyszerűsítik a mikrokontroller programozását.
Ha a mikrokontrolollert eltávolítjuk a vezérlőáramkörből, akkor a foto-kommutátor
képes közvetlenül táplálni a MOSFET kapcsolót, bár a hatásfok csökkenni fog.
A vezérlő impulzusok sorrendje
Az impulzusok megjelenhetnek a forgás minden 9°, 18°, 27°, 36° vagy 45°-ánál. Tulajdonképpen a 90°, 180°, 270°, 360°-oknál is lehetséges volna, de ekkor az energiaátvitelt minimalizálni kellene (ez csak sikló üzemmódban hasznos).
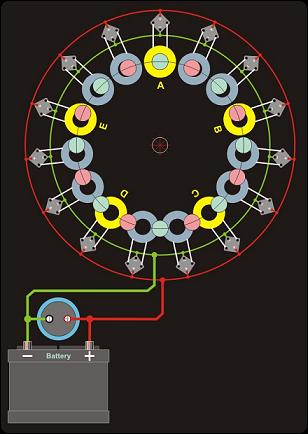
Az itt következő animációk mindegyike az elülső panel felöli nézetet mutatja, vagyis amikor csak az északi pólusok vannak taszítva.
A tekercsek színjelölése a következő:
- Sárga - vezérlő
- Kék - generátor
A mágnesek színjelölése pedig:
- Zöld - északi pólus
- Piros - déli pólus
| 9°-os
üzemmód
40 impulzus fordulatonként A-C-E-B-D A legnagyobb impulzus arányt biztosítja az unipoláris vezérlő rendszerben Maximális energiát juttat a rotorra |
| 18°-os
üzemmód
20 impulzus fordulatonként A-E-D-C-B |
| 27°-os
üzemmód
13,33 impulzus fordulatonként A-B-C-D-E |
| 36°-os
üzemmód
10 impulzus fordulatonként A-D-B-E-C |
| 45°-os
üzemmód
8 impulzus fordulatonként Az impulzusok csak az 'A' vezérlő tekercsre jutnak Ez a tekercs minimális lehűlési ideje |
17. ábra. A vezérlő impulzusok sorrendje
Generátor - egyenirányító/kondenzátor
A geometriai kialakításából adódóan ez a készülék 15 különböző fázisú váltakozó áramot biztosít a kimenetén, mely fázisok nem illeszkednek pontosan, ezért a kimeneti jelek egyesítéséhez a fáziskülönbségeket meg kell szűntetni. Ezt egyenirányítással érjük el. Mindegyik tekercs kimeneti jelét egy-egy teljes hullámú egyenirányítóval alakítjuk át egyenárammá és csak ezt követően egyesítjük őket. Ez az egyesített, egyenirányított kimeneti áram egy elektrolit kondenzátor-együttest tölt fel.
18. ábra. A generátor kimeneti áramának visszatáplálása az akkumulátorba
Az egyenirányító diódák Schottky diódák, mivel ezek jó hatásfokúak, nagyáramúak, nagysebességűek és alacsony nyitóirányú feszültséget igényelnek.
A kondenzátor-együttes pár jó minőségű, számítógépekhez gyártott elektrolit kondenzátorokból áll, melyeket párhuzamosan kapcsolunk és két csavarral ellátott házban helyezünk el.
Az akkumulátor csoport
Az akkumulátor csoport minimum két darab 12 V-os mélykisülésű ólomsavas akkumulátorból áll, egy "TÁPLÁLÓ" és egy "TÖLTÖTT" akkumulátorból. A szükséges amperóra igénytől függ az akkumulátor párok száma.
Amikorra a motor lemeríti a "TÁPLÁLÓ" akkumulátort, a "TÖLTÖTT" akkumulátor a generátor által már teljesen fel is van töltve. A töltés üteme meg kell hogy haladja a kisülés ütemét, csak így biztosítható, hogy a "TÁPLÁLÓ" akkumulátor kisülésekor a "TÖLTÖTT" akkumulátor már teljesen feltöltődött.
Az akkumulátorok élettartamát növelhetjük azáltal, hogy rendszeresen akár elektromos, akár kémiai módszerekkel eltávolítjuk az elektródákra lerakódott kénréteget.
Mivel az akkumulátorok cserélgetése nem túl gyakori esemény, ezért erre a célra egy nagyáramú teljesítmény relé is használható, de egy másik lehetséges megoldásként teljesítmény MOSFET-eket is használhatunk.
A feszültség megnövelése
A NEOGEN dinamó célja nem csak az, hogy önmagát táplálja, hanem hogy valamilyen fogyasztót is meghajtsunk vele. Amennyiben a fogyasztók hálózati fogyasztók, akkor a vezérlő tekercseken megjelenő váltakozó feszültséget először feltranszformáljuk a megfelelő értékre, majd azt egyenirányítjuk.
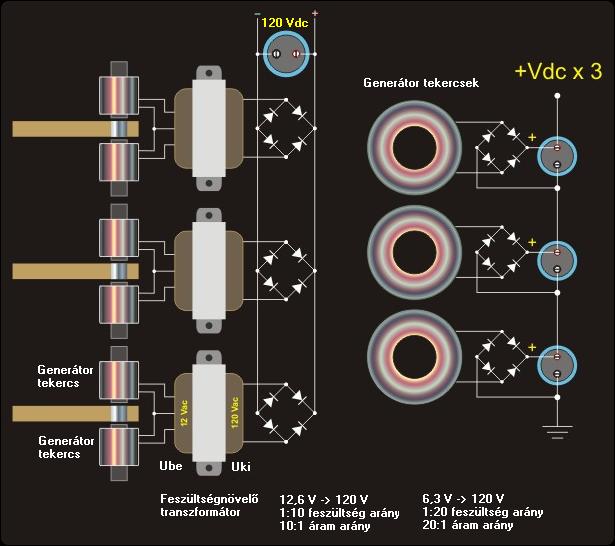
19. ábra. A kimeneti feszültség növelésének egy lehetséges módja
Az így kapott egyenfeszültséget egy áramkör segítségével 50 Hz / 60 Hz-es szinuszos váltakozó feszültséggé alakítjuk.
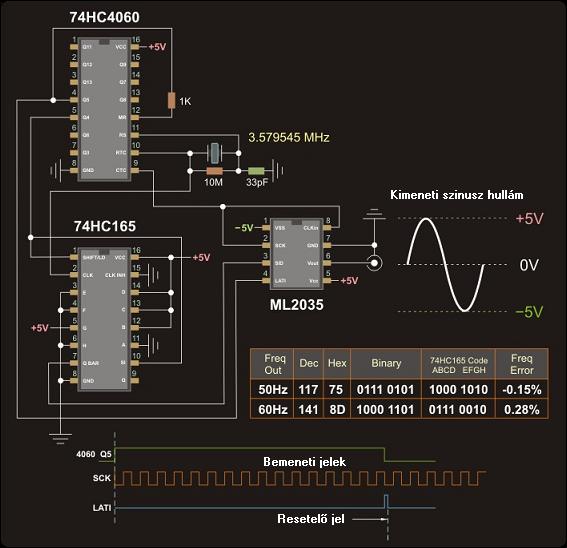
20. ábra. Digitálisan szintetizált 50 Hz / 60 Hz szinusz jel generátor (A nagy teljesítményű tranzisztor fokozat nincs a rajzon)
A szinusz jel generátor a következő IC-ket tartalmazza
- 74HC4060 - 14 állapotú oszcillátoros körszámláló
- 74HC165 - 8 bites párhuzamos bemenetű / soros kimenetű shift regiszter
- ML2035 - szinusz jel generátor
Az elkerülhetetlen kérdés: Ez egy perpetuum mobile?
Hadd fogalmazzam meg teljesen egyértelműen, hogy ez NEM egy perpetuum mobile. Köszönöm!
A perpetuum mobile a végtelenségig működik. Semmilyen emberi kéz által gyártott gép sem lehet örök! Egyik készülék sem működik örökké! Ez a technológia útja! Előbb vagy utóbb valamelyik alkatrész eltörik vagy fizikailag esetleg elektromos szempontból elhasználódik, ami miatt a hiba kijavításáig a készülék leáll. Ezután a készüléket ismét be lehet indítani és az a következő hibáig ismét működőképes lesz.
Ugyanakkor a jelenleg már elérhető ritka földfém mágnesek lehetővé teszik számunkra, hogy az áhított célhoz közelebb jussunk.
A célunk az, hogy minimális energia befektetéssel maximális kimeneti energiát és működési időt kapjunk, miközben az energiaveszteségek (hő, kopás, súrlódás, rángatás, vibráció stb. ) minimalizálásával és hosszú élettartamú anyagok használatával az állási időt is minimalizáljuk
Valószínűleg mindenki számára nyilvánvaló, hogy ennek az eszköznek a használhatósága korlátozott a Föld zord éghajlatú vidékein.
Az anyagot angol nyelven itt találod.
![]()
Megjegyzések:
- A tekercsek vasmagját képező magnetit rúd nagy valószínűséggel ferrit rúd lehet.
- Az ajánlott két akkumulátor helyett tulajdonképpen egy is elég lenne, hiszen a kimeneti jelet közvetlenül rávezethetjük a "TÁPLÁLÓ" akkumulátorra. De akár még az is elképzelhető, hogy csak az indításhoz használunk akkumulátort, utána a kimeneti jelet közvetlenül - vagy nagy kapacitású kondenzátorok párhuzamosan kapcsolásával - a bemenetre vezetjük, az energiafelesleggel pedig a fogyasztót tápláljuk.
Amennyiben Te is megépíted a NEOGEN Dinamót, mindenképpen oszd meg az eredményeidet velünk.
![]() Bevezető
Bevezető![]() Menü
Menü![]() Egy
reprodukált modell
Egy
reprodukált modell![]()
Utolsó frissítés dátuma: 2006 február 24.